

驅(qū)動(dòng)中國2017年12月26日消息 目前大多雙足行走機(jī)器人基本都是以“緩慢笨拙”的步伐前行,但日本東京大學(xué)的教授研發(fā)的雙足行走機(jī)器人或?qū)眢@喜。

由于該機(jī)器人搭載了能夠瞬間產(chǎn)生強(qiáng)大力量的馬達(dá),如果將其換算成人類大小,奔跑速度相當(dāng)于一流馬拉松選手。
據(jù)悉,該款機(jī)器人腿長14厘米,重量不到1千克,奔跑時(shí)速可達(dá)4.2公里。如果換算成腿長70到80厘米的成年人,時(shí)速可達(dá)20公里。
值得注意的是,該款機(jī)器人之所以能夠精準(zhǔn)掌握行走狀態(tài)和姿勢得益于研究團(tuán)隊(duì)設(shè)置在外部的相機(jī),由相機(jī)拍攝機(jī)器人的動(dòng)作,并把信息反饋給機(jī)器人。
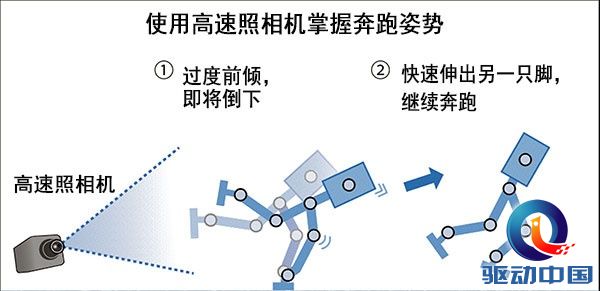
該機(jī)器人通過高速照相機(jī)拍攝行走姿勢并進(jìn)行自動(dòng)控制,成功像人類一樣呈前傾姿勢行走。其腰部、膝蓋和腳踝均可活動(dòng),能夠模擬人類的行走姿勢。
研究人員表示今后力爭把相機(jī)裝到機(jī)器人身上,簡化控制系統(tǒng)。可以想象無論是服務(wù)機(jī)器人還是工業(yè)機(jī)器人如果能夠跟上人類行進(jìn)速度,將會大大削減“人機(jī)交互”的不適感,在很大程上提高用戶體驗(yàn)。
據(jù)悉,該雙足行走機(jī)器人有望在3到5年內(nèi)達(dá)到實(shí)用化。對于現(xiàn)在處于一線的導(dǎo)診機(jī)器人、巡邏機(jī)器人等一眾服務(wù)機(jī)器人來講,撕掉“行進(jìn)緩慢”的標(biāo)簽是必經(jīng)之路,而該機(jī)器人的出現(xiàn)則會給相關(guān)機(jī)器人廠商帶來不少靈感。



